Forms Of Closed Loop Stepper Control
Forms Of Closed Loop Stepper Control Roboticstomorrow

Advertisement Ebay Stepperonline 1 Axis Closed Loop Stepper Cnc Kit 4 6 N M 651 54 Oz In Nema 34 In 2020 Stepper Motor Steppers Axis
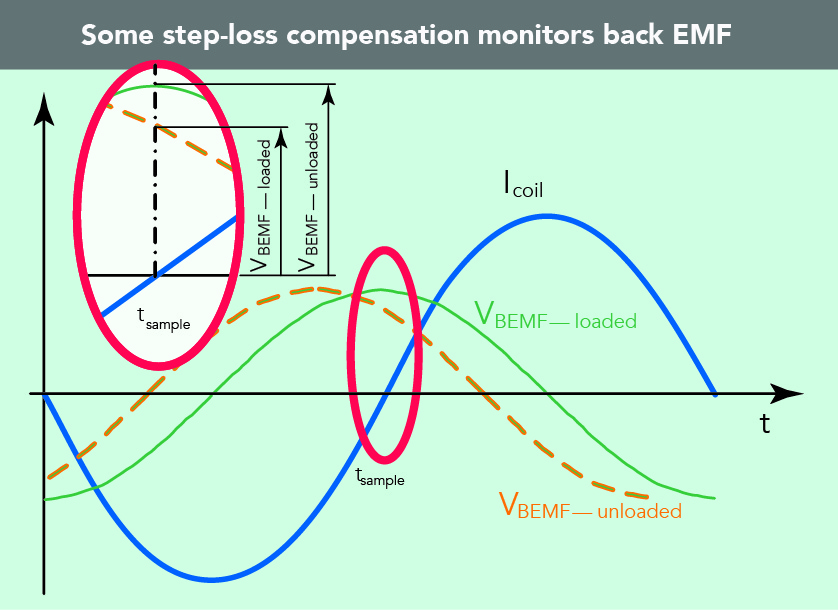
Faq What Is Closed Loop Stepper Motor Control With Step Loss Compensation
Keep Your Step Motor Position With A Closed Loop Motion Control System

Toauto Integrated Closed Loop Nema23 Stepper Motor With Driver Ihss57 36 20 2nm 36v Position Encoder For Lazer 3d Printer Cnc Control Amazon Com Home Kitchen

Bringing Closed Loop Functionality To Stepper

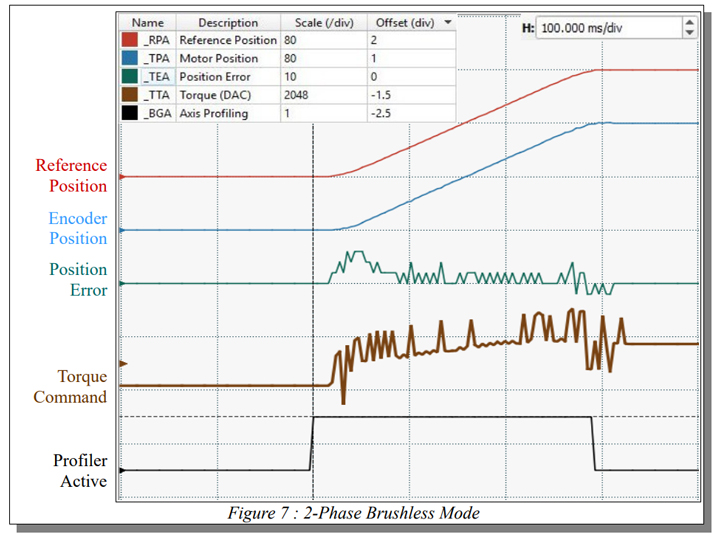
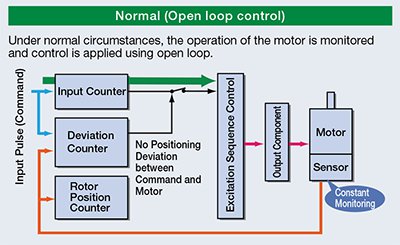
Closed loop microstepping is a true closed loop mode of operation and is the optimum use of a stepper motor still being driven as a stepper.
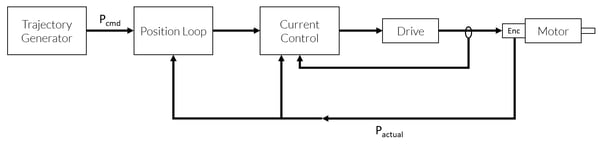
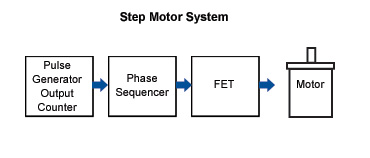
Forms of closed loop stepper control.

Open Loop System Vs Closed Loop System Motion Control Tips

Setup Of Leadshine Hbs507 Closed Loop Or Hybrid Servo Step Driver Youtube Loop Setup Drivers

Pin By Stepperonline On Closed Loop Stepper Motor Driver Stepper Motor How To Fall Asleep Luxury Store

Difference Between Closed Loop And Open Loop Hydraulic System Fundamentals And Applications Of Hydraulic Systems Hydraulic Mechanical Engineering Technology

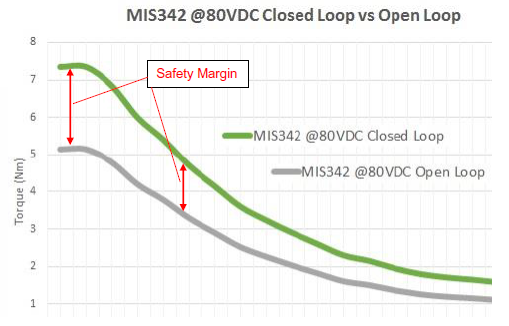
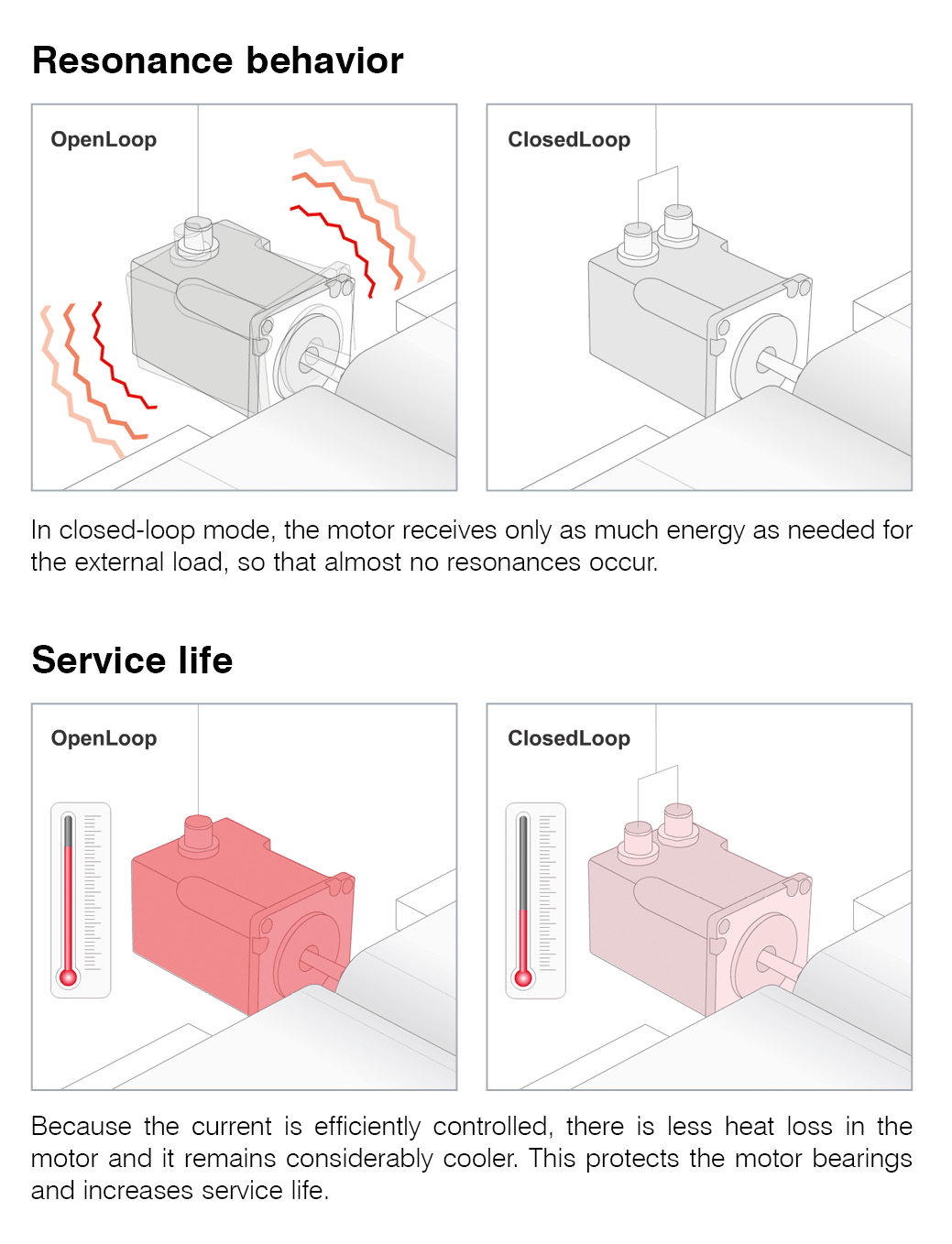
Advantages Of A Closed Loop Stepper Motor System Simply Smarter Circuitry Blog
Jvl Closed Loop For Stepper Motors

Cnc Router 3 Axis Kit 3pcs Tb6600 Stepper Motor Driver 3pcs Nema23 425 Oz Motor 350w Power Supply 1pc 4 Axis Interfa Stepper Motor Cnc Controller 4 Axis Cnc
Electric Linear Cylinders Stepper Motor Linear Actuators

Stepper Motors With Non Backlash Planetary Gearhead Pk Series With Planetary Gearhead 0 72 Step Stepper Motor Mechanical Engineering Motor

3nm Nema23 Cnc Router Closed Loop Stepper Driver And Motor Kit Dc36v Hbs860h 57hbs30 Cnc Router Router Cnc

Dc Motor Closed Loop Control Software Arduino

3dof Ball On Plate Using Closed Loop Stepper Motors Stepper Motor Steppers Plates

Pin On Jovo

Quickstep Closed Loop Stepper Motor Said To Provide Higher Torque Faster Acceleration Torque Control Stepper Motor Steppers Quickstep

Parker E Series Closed Loop Stepper Systems Valin

Nodemcu Esp8266 12 E Controlling Stepper Motor Over Wifi Stepper Motor Arduino Stepper Motor Wifi
Stepper Motor Basics
Stepper Motors Many Sizes Power Versions Nanotec
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcrf3ux9rupd9hp2kpnf723pywy38 Vxplk9cg4wmqkvdqcu 0is Usqp Cau

Stepper Motor Drive Control Kit 2 2nm Nema23 Dc36v Dsp Closed Loop For Laser Cutters Amazon Com Industrial Scientific

2020 Oem Support For 60mm Servo Closed Loop Stepper Motor Driver Kit Nema 24 2 3nm 1 8degree 3m Encoder From Luga4564 80 41 Dhgate Com

Pin On Industrial Commercial Equipment Supplier

Mophorn Nema23 1 2n M Closed Loop Servo Motor Stepper Motor 90mm 6a 2phase Hybrid Servo Driver Controller Cnc Kit With Power Supply For Cnc Router Engraving Milling Machine Amazon Com

Mechaduino Closed Loop Stepper Servos For Everyone Hackaday
Source : pinterest.com
